About Me
Hi there! I'm an engineer passionate about creating the next breakthroughs in technology, and focused on working on early stage ideas, helping to shape new product definitions. I have worked primarily in the consumer electronics industry in the past, but my real passion is in robotics, spacecraft, and intelligent autonomous systems.
I believe in quality of a final product at all costs, and I am never satisfied until every detail of a project has been seen after. As such, I like to work at all levels of the software stack. Most importantly, I am always looking to learn something new and seeking my next opportunity to expand my horizons - the more challenging and foreign, the better!
Languages I speak
 |
 |
 |
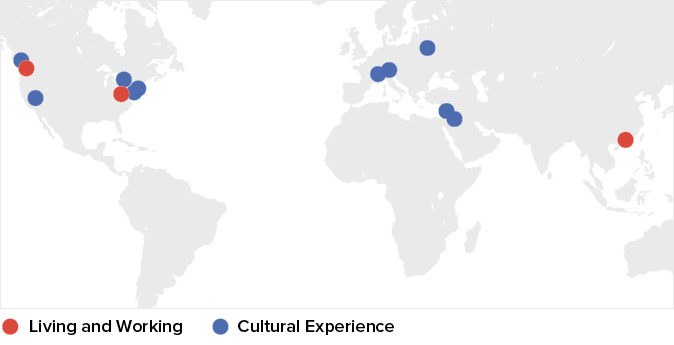
Places I've Been
Education
Carnegie Mellon University |
Aug 2007 to May 2011 |
Electrical & Computer Engineering |
|
Work Experience
Red Barn Robotics |
June 2024 to Present |
Co-Founder, CTO |
|
|
Autonomous weed-killing robot for organic farms. |
|
Relativity Space |
July 2022 to March 2024 |
Mission Assurance and Vehicle Simulation |
|
Staff Software Engineer |
|
|
Part of the Integrated Software group responsible for all parts of the company's rocket software stack. Specifically focusing on building the next generation of flight software in a testable, verifiable, and deployable way that spans all stages of software development and delivery.
|
|
NVIDIA |
Oct 2020 to July 2022 |
NVIDIA Drive AV Solution |
|
Senior Software Engineer in Mapping |
|
|
Responsible for all on-vehicle mapping contents for autonomous vehicles - from acquisition, to distribution, and back to telemetering discrepancies between perception and expectations.
|
|
Maka ARS |
March 2020 to Sep 2020 |
Maka Weed Killing Robots |
|
Senior Software Engineer |
|
|
Brought on with deep experience in all parts of the mechatronic and electrical systems, and knowledge of how to build complicated hardware systems.
|
|
SpaceX Corp |
Sep 2015 to March 2020 |
Starlink Satellite Internet |
|
Flight Software Engineer 2 |
|
|
Responsible for all aspects of Telemetry, Tracking, and Control ground software systems and architecture. As member of the team, reviewed code and architecture direction from peers. Principally responsible for hardware/vendor abstraction antenna dish controlling software to integrate with company standard software stack, and the antenna time scheduler for allocating communications with satellites. Built constellation network simulation software from scratch using data collated from public sources for analysis to optimize business operations and deployment plans.
|
|
Mark One Lifestyle Inc |
Oct 2014 to Aug 2015 |
Vessyl Smart Cup |
|
Director of Firmware and Algorithms |
|
|
Built from scratch and managed two separate but inter-related software teams to develop the firmware and algorithms for the Vessyl smart cup. Lead the technical specification creation, contributed to the product specification creation, and selected major hardware components for cost-effectiveness and performance. Mentored junior developers in the creation of a unified code-base that was platform-agnostic to support alternate component sourcing and long-term evolution of the hardware.
|
|
Microsoft Corp |
Dec 2011 to Oct 2014 |
Personal Devices |
|
Software Development Engineer |
|
|
Worked extensively on biometric algorithms alongside Microsoft Research focusing on world-first automatic human activity recognition and exercise agnostic repetition counting. Organized rigorous scientific validation studies of established medical science papers, identifying critical flaws, and incorporating the fixed implementations into the Microsoft Band product.
|
|
Disney Research Pittsburgh |
Aug 2011 to Dec 2011 |
TeslaTouch |
|
Product Development Engineer |
|
|
Revised a research hardware prototype into a cost effective and mass producible design. Developed versatile and fault-tolerant embedded software to integrate with existing host driver and software. Designed, simulated, and prototyped electronics for driving high voltage, human contact safe signals.
|
|
Microsoft Corp |
May 2011 to Aug 2011 |
Xbox Accessories Incubation |
|
Intern Incubation Engineer |
|
|
|
Microsoft Corp |
May 2010 to Aug 2010 |
Windows Direct2D |
|
Intern Software Development Engineer |
|
|
|
Carnegie Mellon University |
May 2007 to May 2010 |
Robotics Institute |
|
Research Associate |
|
|
|
Astrobotic Technologies |
Aug 2008 to Dec 2008 |
RedRover |
|
Power management team |
|
|
|
Projects
SWANDRIVE |
Aug 2010 to May 2011 |
Smart Wireless Analysis Network for Driver Information and Vehicle Efficiency |
|
|
|
JEULES |
Aug 2009 to May 2011 |
JEULES Energy Usage Learning Electrical Socket |
|
|
|
AAIT |
Aug 2007 to Aug 2009 |
Assistive Automotive Intelligence Technology |
|
|
|
Skills and Technology
Personal Skills |
|
|
Platforms, Tools, and Technologies |
|
|
Languages |
|
|
Architectures |
|
|
Compilers |
|
|
Version Control |
|
|
Patents
- Extending Gameplay With Physical Activity Monitoring Device - USPTO Grant # 8951164
- Automatic Exercise Segmentation And Recognition - USPTO Grant # 9174084
- Personal Training With Physical Activity Monitoring Device - USPTO Grant # 8951165
- Motion Based Estimation Of Biometric Signals - USPTO Grant # 9717427
- Intelligent Vessel
Publications
RecoFit: Using a Wearable Sensor to Find, Recognize, and Count Repetitive Exercises |
|
ACM CHI 2014 DOI 10.1145/2556288.2557116 |
Interested in working with me?
Awesome! I'm always looking for interesting opportunities. Let's connect.